Theoretical background
Here you will find theory about process systems and numerical calculation, which helps you to understand the simulation principle applied in Dyssol.
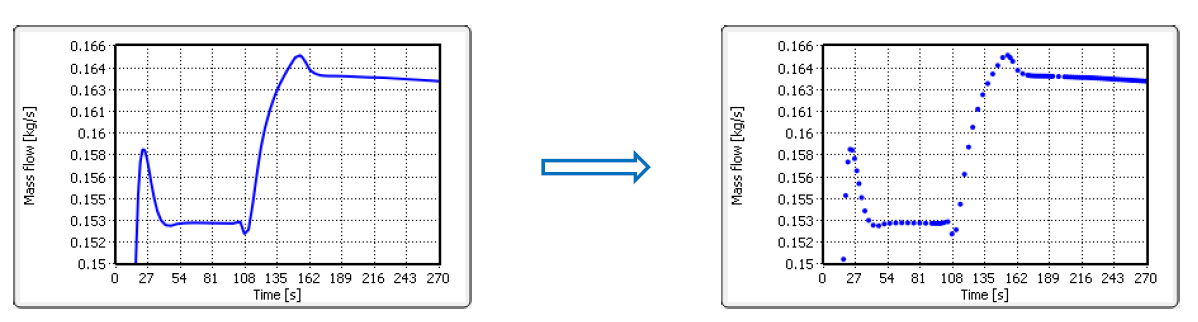
Discretization
A continuous processes is discretized using time points, and each time point is a snapshot of the process state, as shown below.
Process systems
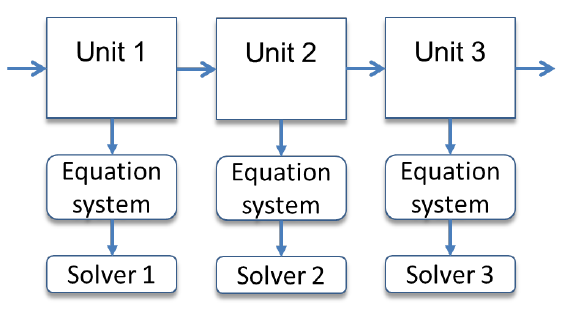
Sequential-modular approach
The simulator of Dyssol applies sequential-modular approach, which processes the units in sequence. For each unit there are a equation system and the corresponding solver, as shown in the figure below.
The advantages of this approach are listed as follows:
Conceptual simplicity,
Correspondence to the physical structure of processes,
Higher flexibility,
Possibility to use different numerical methods to calculate models.
However, difficulties may occur when processing flowsheets with recycle streams.
See also
Marquardt, Dynamic process simulation - recent progress and future challenges (1991).
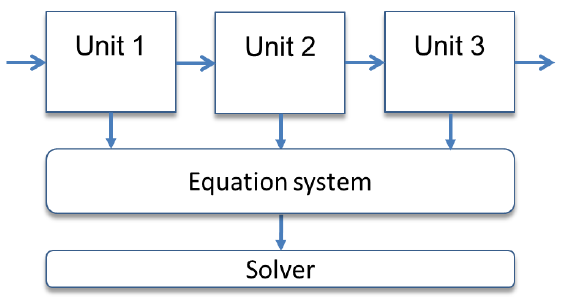
Equation-oriented approach
Unlike sequential-modular approach, the equation-oriented approach processes all units with a whole equation system and the same solver.
It has the following advantages:
Equations are homogenized and calculated by a single solver,
Better convergence rate, especially on complex flowsheets with recycles.
However, difficulties may occur with simultaneous stimulation of fast and slow changed components, and the usage with heterogeneous models is complicated.
See also
Marquardt, Dynamic process simulation - recent progress and future challenges (1991).
Partitioning and tearing
Dyssol converts the process structure into a suitable sequential form, initializes recycle streams (tear streams) with some values, combines units in recycle loops into partitions, and then solves an entire partition (a recycle system) iteratively over the whole simulation time and separately from other partitions.
An example is shown in the following process flow sheet.
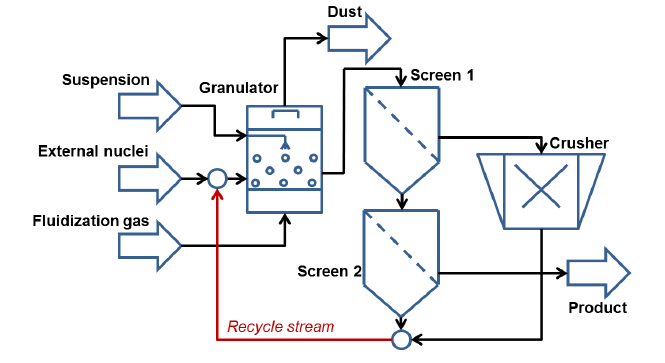
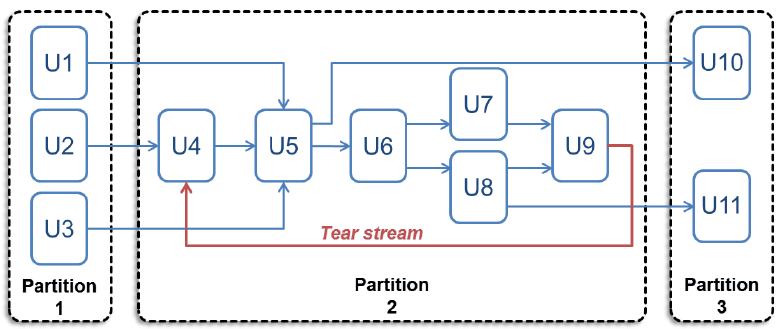
For this flow sheet, the operation units and streams with 3 partitions are shown below schematically.
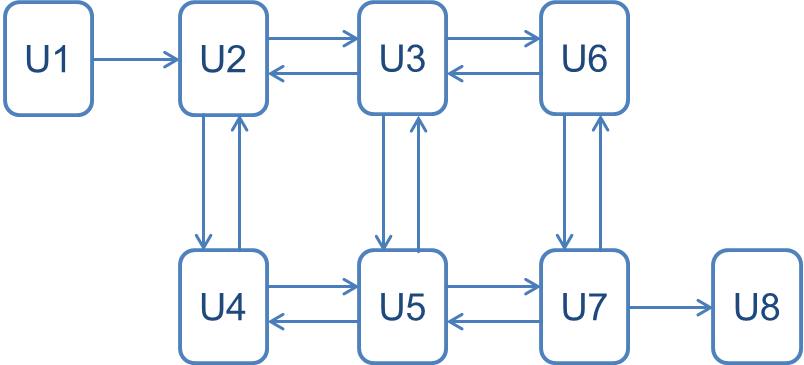
Alternatively, single and multiple schemes can be applied.
For a single scheme, the units and streams are rearranged as below.

The partitions and corresponding streams are:
Partition 1: U1 as normal stream
Partition 2: U2 as normal stream
Partition 3: U3, U4, U5, U6 as normal streams; S1 and S2 as tear streams
Partition 4: U7, U8 as normal streams; S3 as tear streams
Furthermore, the bi-directional connection can be represented in Dyssol as two independent material streams. One of the streams will eventually be selected as a tear stream.
An example is shown in the figure below.
The corresponding calculation sequence is
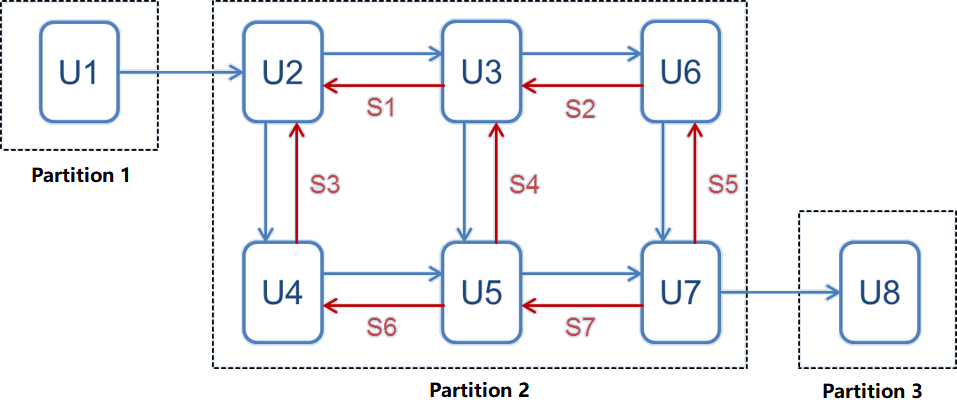
The partition and streams are:
Partition 1: U1 as normal stream
Partition 2: U2, U3, U4, U5, U6, U7 as normal stream; S1, S2, S3, S4, S5, S6, S7 as tear streams
Partition 3: U8 as normal stream
Numerical methods
Waveform relaxation method
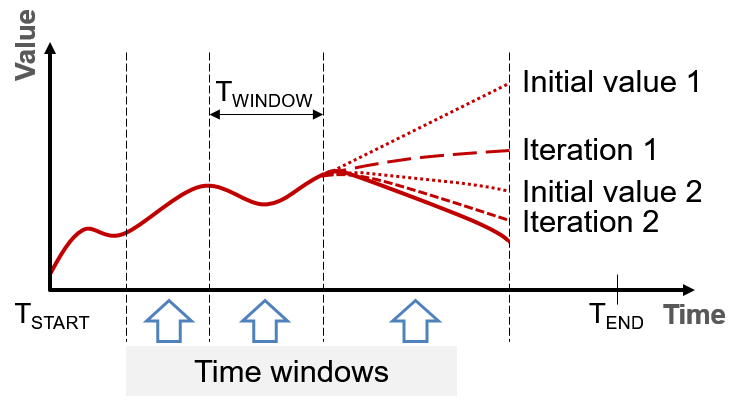
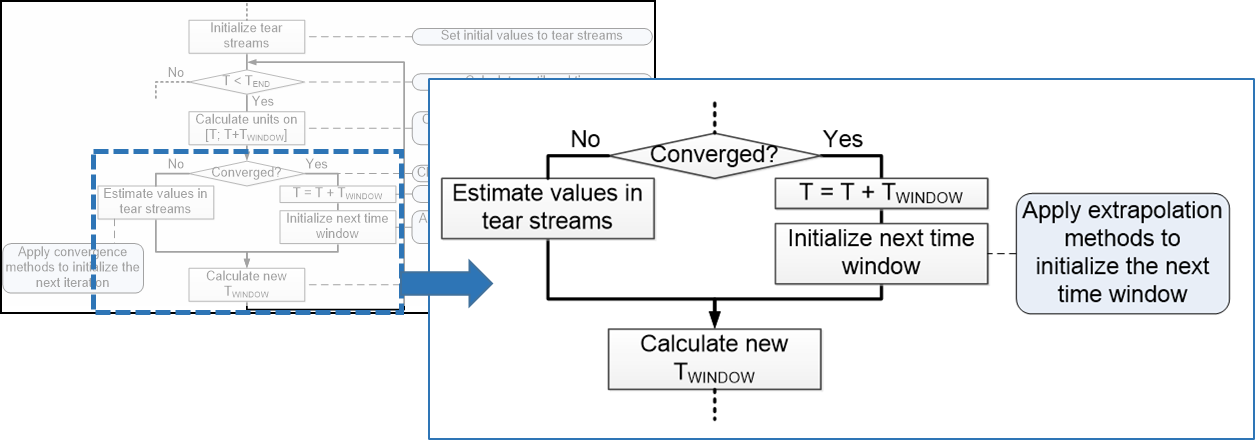
The waveform relaxation method (WRM) is applied to calculate the tear streams. You can find the algorithm in the flowsheet below.
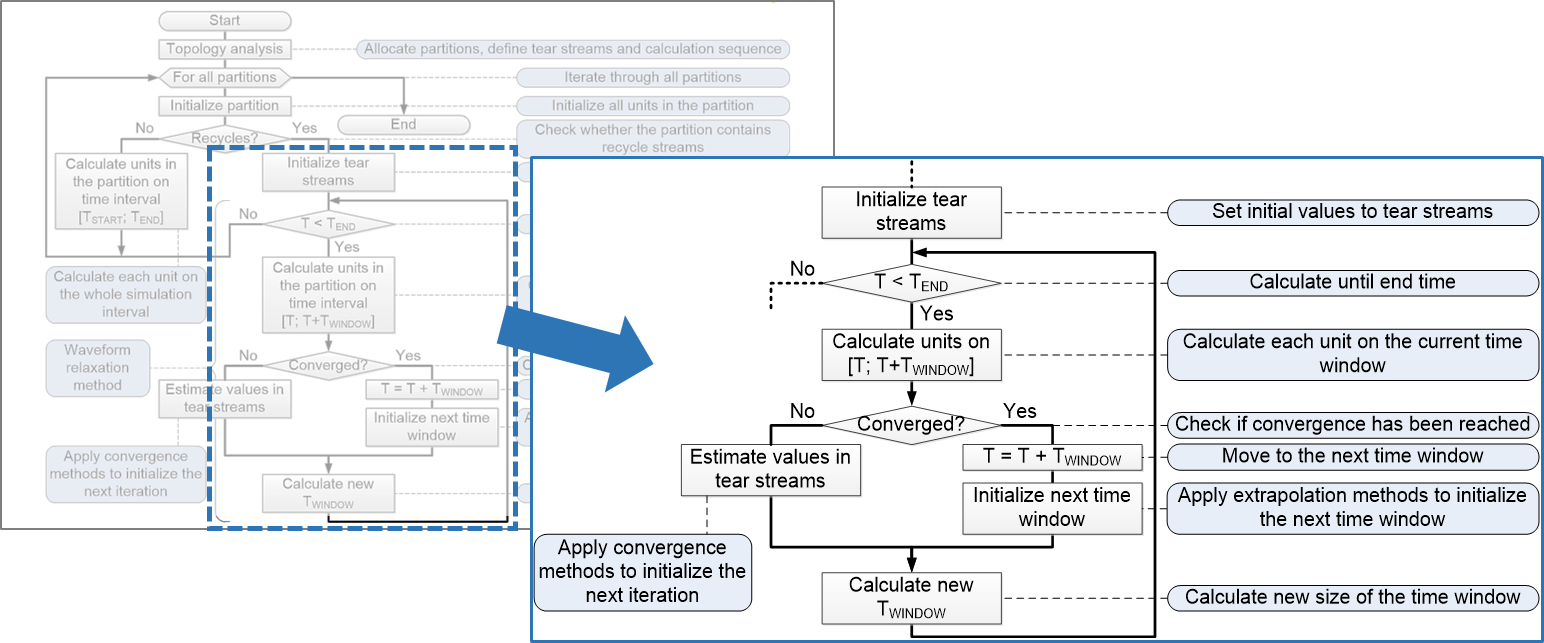
Dyssol splits the whole simulation interval into smaller time windows, it calculates the entire partition on the time window iteratively until convergence occurs, and then initializes parameters of tear streams before calculation of each time window.
Size of the time window varies depending on the convergence rate, and the convergence criterion is the difference between values on successive iterations.
See also
Lelarasmee, the waveform relaxation method for time domain analysis of large scale integrated circuits (1982).
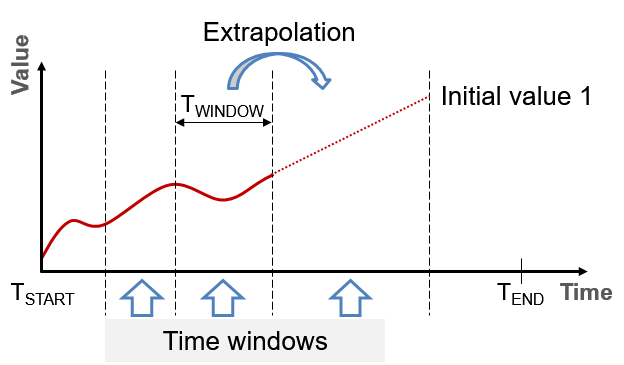
Data extrapolation
Dyssol initializes all parameters of tear streams within the time window before its calculation, and then uses extrapolated values from the previous time intervals as initial data. Prediction accuracy affects the number of iterations required to achieve convergence.
The implemented methods for extrapolation include nearest-neighbor, linear and spline.
Convergence methods
Dyssol uses different convergence methods to initialize parameters of tear streams before each iteration, performs calculations iteratively and stops iterative calculations when the convergence is reached. Between each value, different methods can be applied, as shown in the figure below.
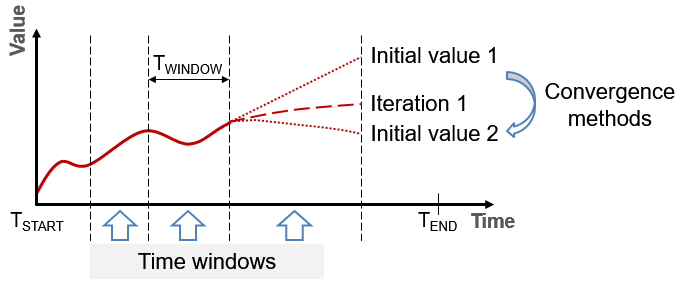
The convergence here is the minimization of residual between calculated and previously estimated values of tear streams.
Note
Notations:
\(Y_{calc}\) – calculated values
\(Y_{est}\) - estimated values
\(R_{tol}\) - relative tolerance
\(A_{tol}\) - absolute tolerance
Estimation algorithm significantly affects the convergence rate and thereby the performance of the whole simulation system.
Three convergence methods are available in Dyssol. The direct substitution method is the least computationally intensive, but has slow convergence rate. On the contrary, Wegstein’s and Steffensen’s method are more computationally intensive but can provide faster convergence.
Direct substitution:
Direct substitution is the simplest method among three methods, which uses values calculated on the previous iteration as the initial data for the next iteration.
\(x_{k+1} = F(x_k)\)
To increase the convergence rate, results of the several previous iterations should be used for data estimation. It could be done by providing direct substitution method with the relaxation parameter \(\lambda\):
\(x_{k+1} = (1-\lambda)\,F(x_{k-1}) + \lambda F(x_k)\)
If \(\lambda = 1\), it transforms to the direct substitution method.
Wegstein’s method:
\(x_{k+1} = q x_k + (1-q) F(x_k)\), where \(q\) is an acceleration parameter, which is defined as follows.
\(q = \frac{s}{s-1}\)
\(s = \frac{F(x_k) - F(x_{k-1})}{X_k - X_{k-1}}\)
Convergence is possible if the parameter \(q\) is in range [-5, 1] and accelerates with a decreasing of its value. Therefore, for a greater control over the convergence process, the acceleration parameter can be additionally bounded on a smaller range.
Steffensen’s method:
This method uses current and two previous iterations.
\(x_{k+3} = x_k - \dfrac{(x_{k+1} - x_k)^2}{x_{k+2} - 2x_{k+1} + x_k}\)